





















Description
DroneCore 1
10 times faster time to market for UAS developers
DroneCore is an AI-powered autopilot platform which brings exceptional value to UAS developers. We make UAS development faster, cheaper, and more resilient.
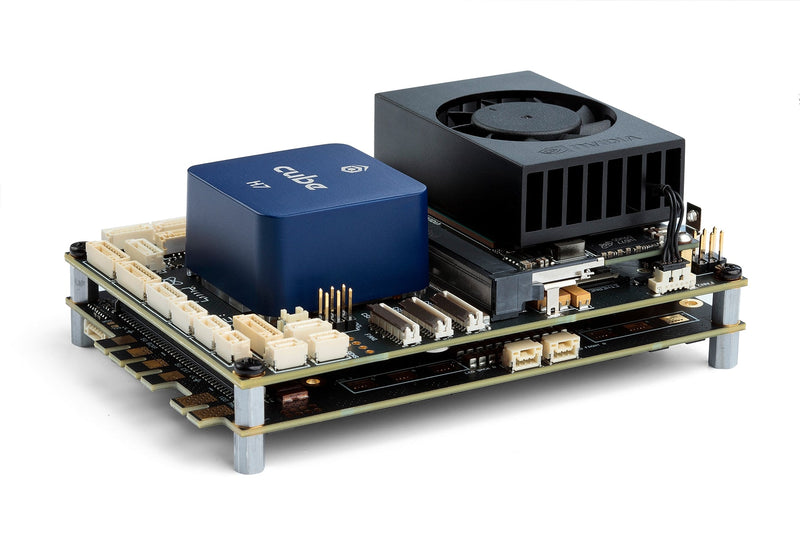
AI-driven autopilot with NVIDIA Jetson, Cube, and ESCs
- NVIDIA Jetson: Xavier NX or Orin NX
- CubePilot: Cube Orange+, Blue or Red
- ESCs: 4x FOC-based speed controller
Features
FOC-based ESCs
Proprietary highly optimized Electronic Speed Controllers suitable for quadcopter or octocopter
Various hardware configuration options
Jetson Xavier NX or Orin NX with support for various CSI and USB cameras (IMX477, OV9281, Flir Hadron, Intel Realsense, Ximea, Allied Vision, etc.)
Redundant FMU
Dual flight controller architecture for different use cases
- The Cube Pilot (Orange+ or Blue) as primary autopilot
- STM32H7 onboard FMU as secondary autopilot
Powerful SDK and easy-to-use API interface
- ROS2-based SDK ready to use for autonomous flights
- Unified Python API for various software layers (hardware access, localization, navigation, AI, etc.)
- Open Source architecture
Various vehicles support
Support for different types of drones like VTOL, copters, planes, rovers, etc.
Redundant power supply options
9 – 30V power supply
Specifications
Purpose
- The purpose of DroneCore 1 is to speed up UAS development with a cutting edge autopilot solution.
- With rich connectivity and ESCs, DroneCore 1 is suitable for serial production of custom UASs.
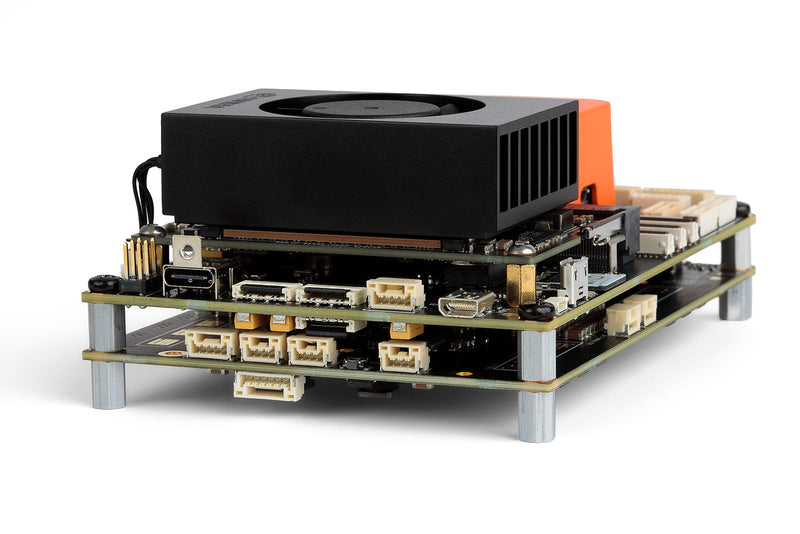
- 115 x 80 x 45mm
Mechanical parameters
- Weight 247g - including Cube orange, Xavier NX, Xavier heatsink with fan
- Dimensions 115 x 80 x 45mm
- Mount with 4 screws/spacers M3 109 x 74mm
- WiFi module
- WiFi antennas 2pcs
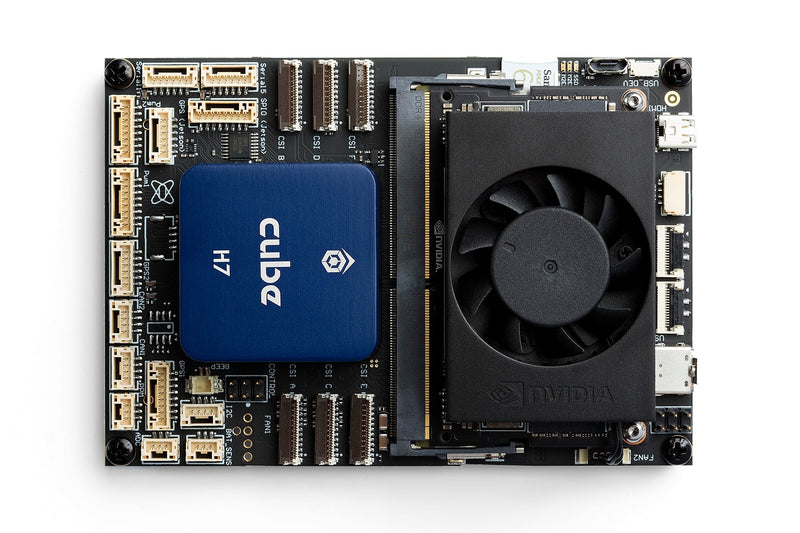
Primary FMU Connections (CUBE Pilot)
- Direct PWM output (6 + 8 lines)
- PPM input
- 2x CAN, 4x UART, 2x I2C, analog
- Power sensor input, buzzer
Electrical parameters
- Power supply range: 12V – 35V (6S LiHV)
- Integrated DC/DC converter for control circuits
- Redundant power supply with power good monitoring for control unit
- Current protected peripheral connectors
- 4 x FOC UAVCAN ESC 40A, featuring motor identification and motor diagnostics
- Power sensor, SMBUS
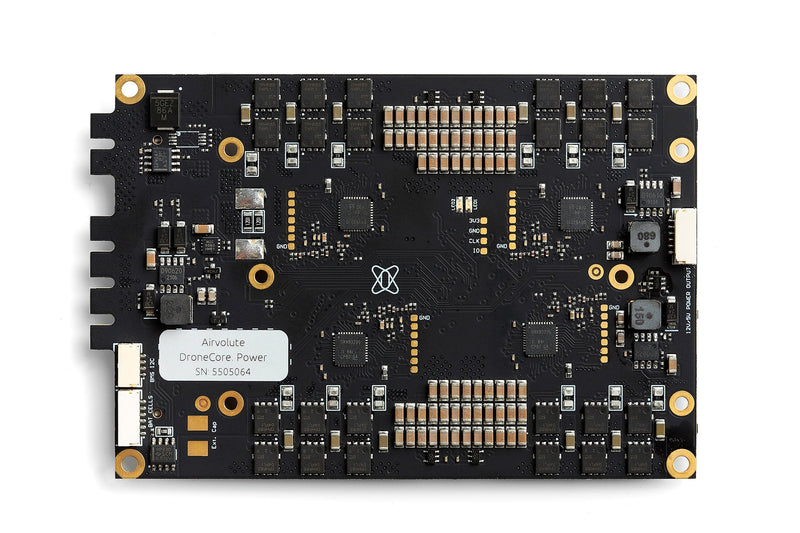
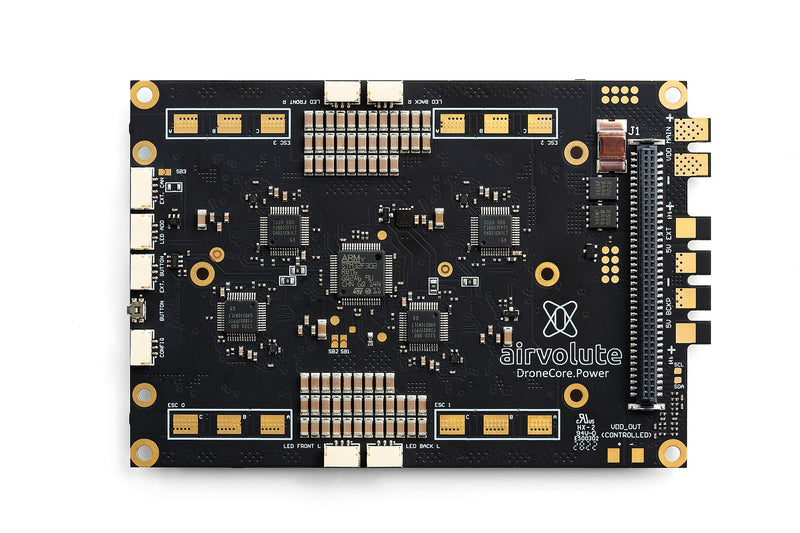
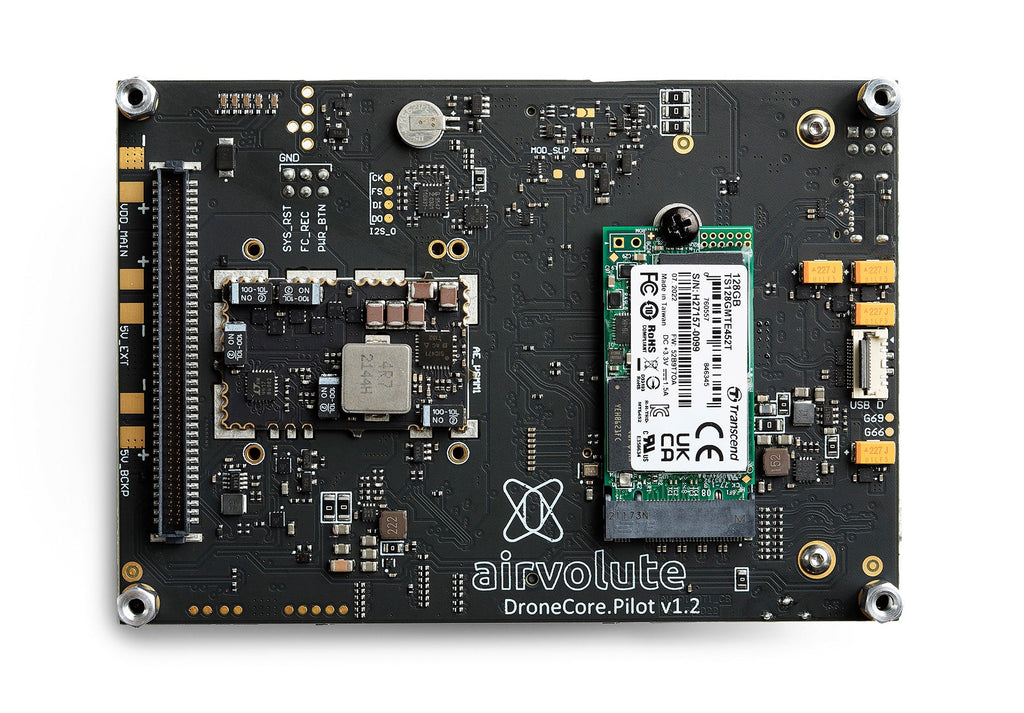
DroneCore.Power (bottom power board)
- 4 x FOC UAVCAN ESCs – 40A peak / 20A permanent
- power sensor, SMBUS,
- LED Driver for 4x WS2812B strips
Ardupilot (Cube) Connections
- PPM input
- PWM output (7 + 7 lines)
- 2x CAN
- 4x UART
- 2x I2C
- Buzzer
- Power sensor input
- ADC input
- Buzzer
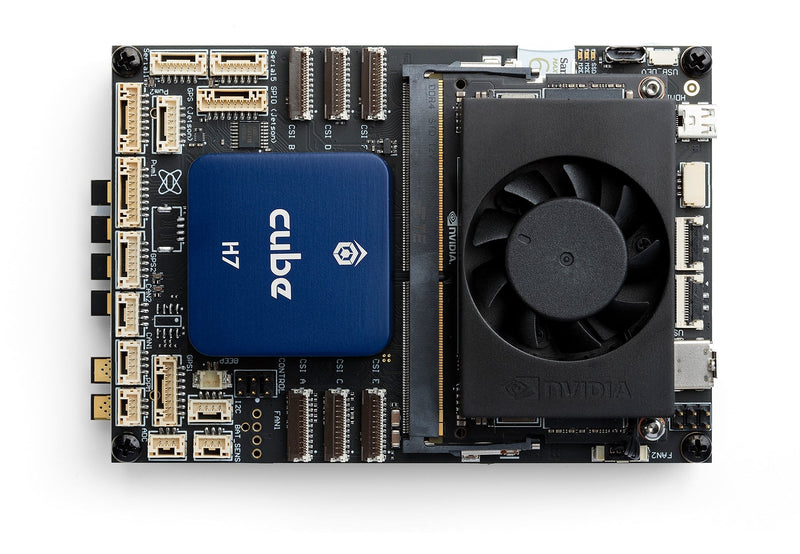
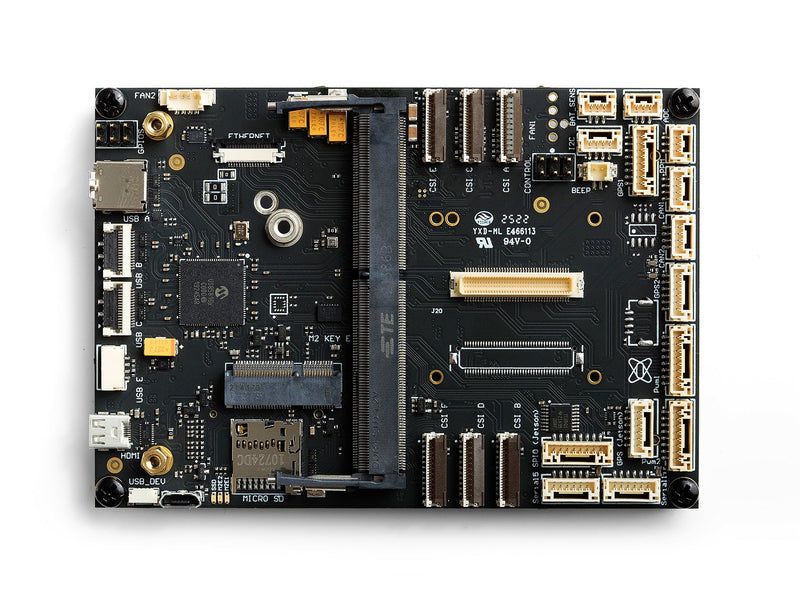
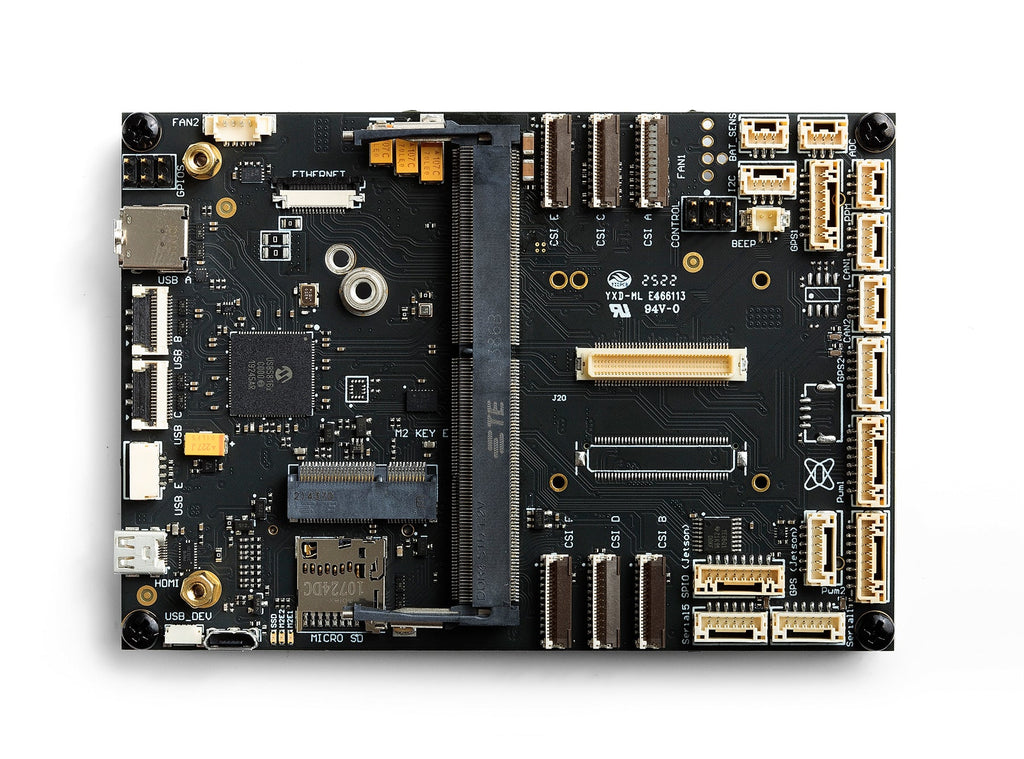
Jetson connections:
- PCI Express (M2, Key E connector)
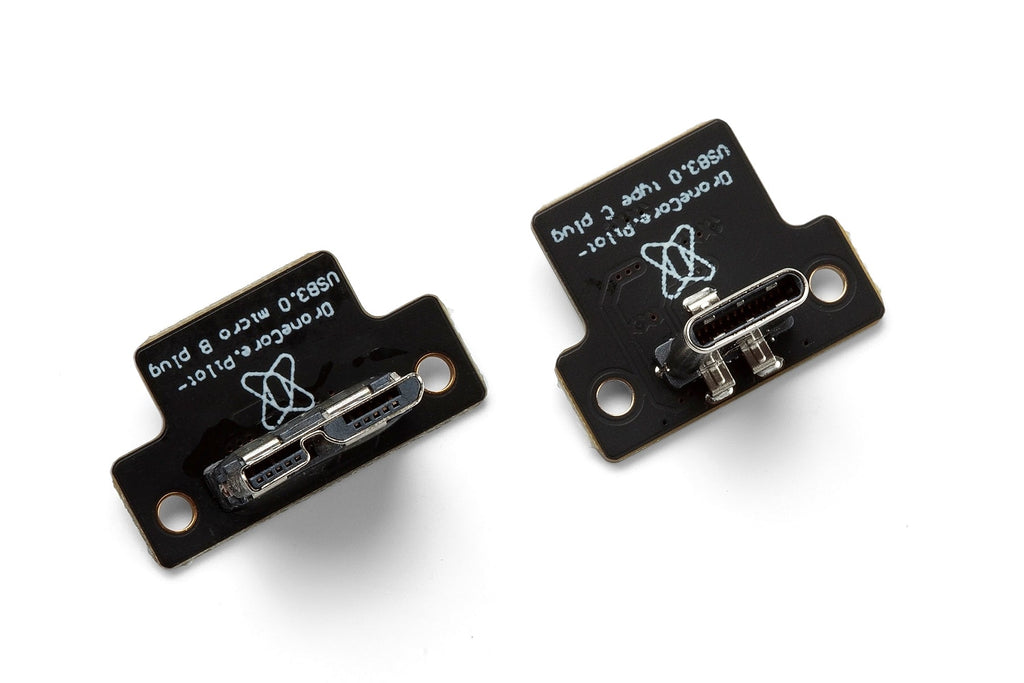
- 4x USB 3.0 (ZIF connectors, reductions available)
- Gigabit Ethernet (ZIF connector, reductions available)
- 6 CSI (22 pin)
- 4 GPIO
- UAV CAN, UART, I2C, SPI
- IMU BMI088 and barometer BMP388 on board
- USB 2.0 for debugging
- Micro SD card
- Video output connector (micro HDMI)
- Fan
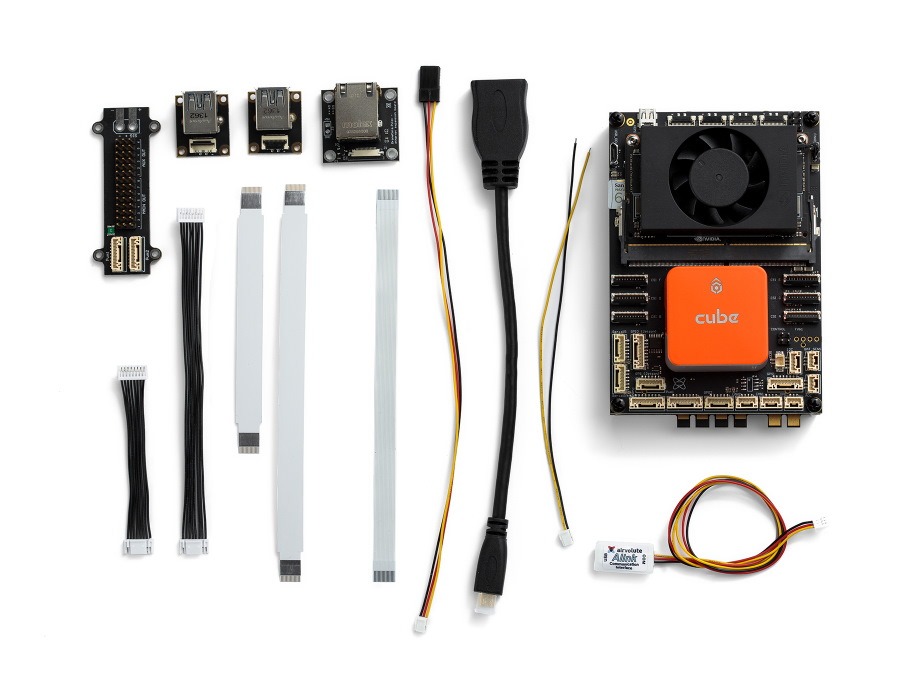
Details:
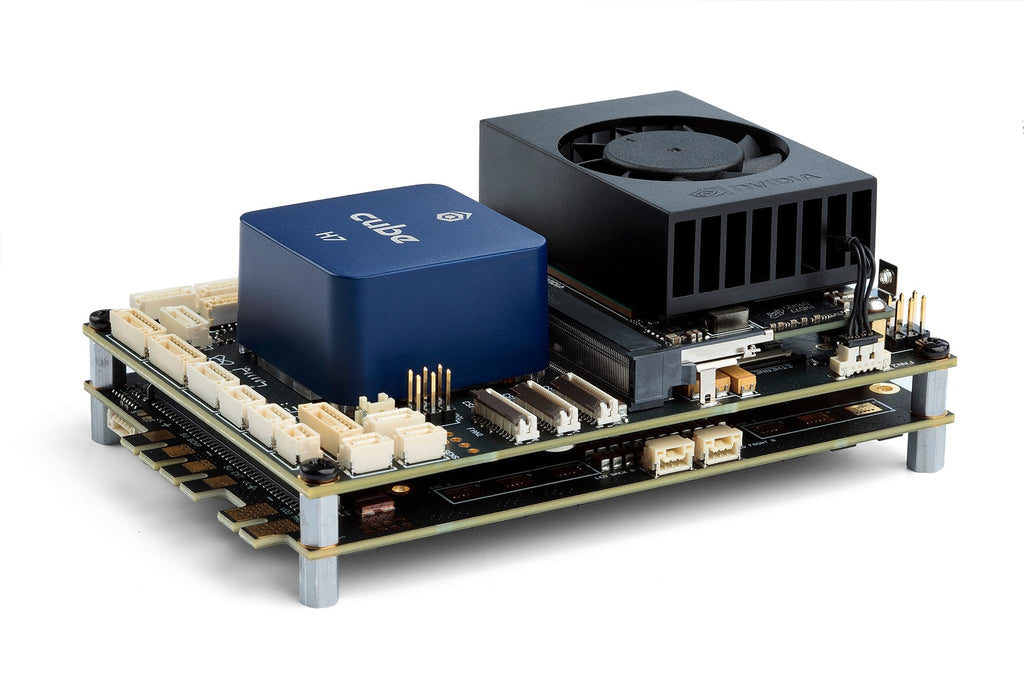
DroneCore.Suite consists of these main blocks
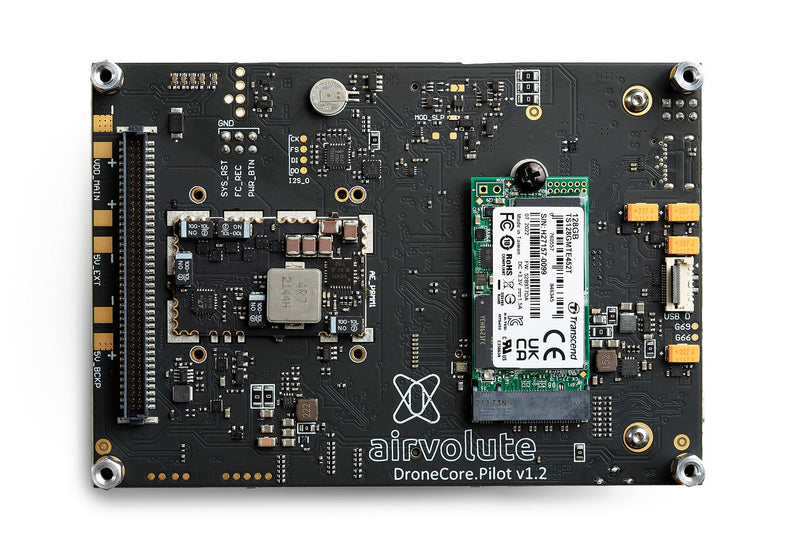
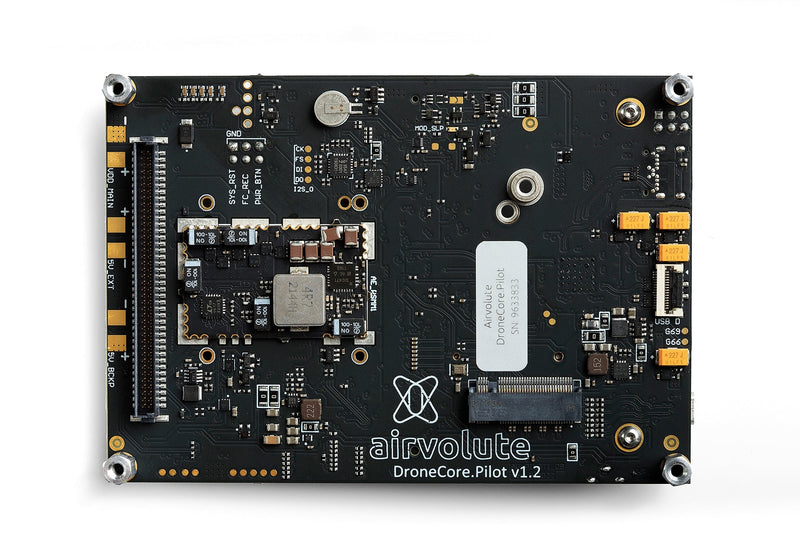
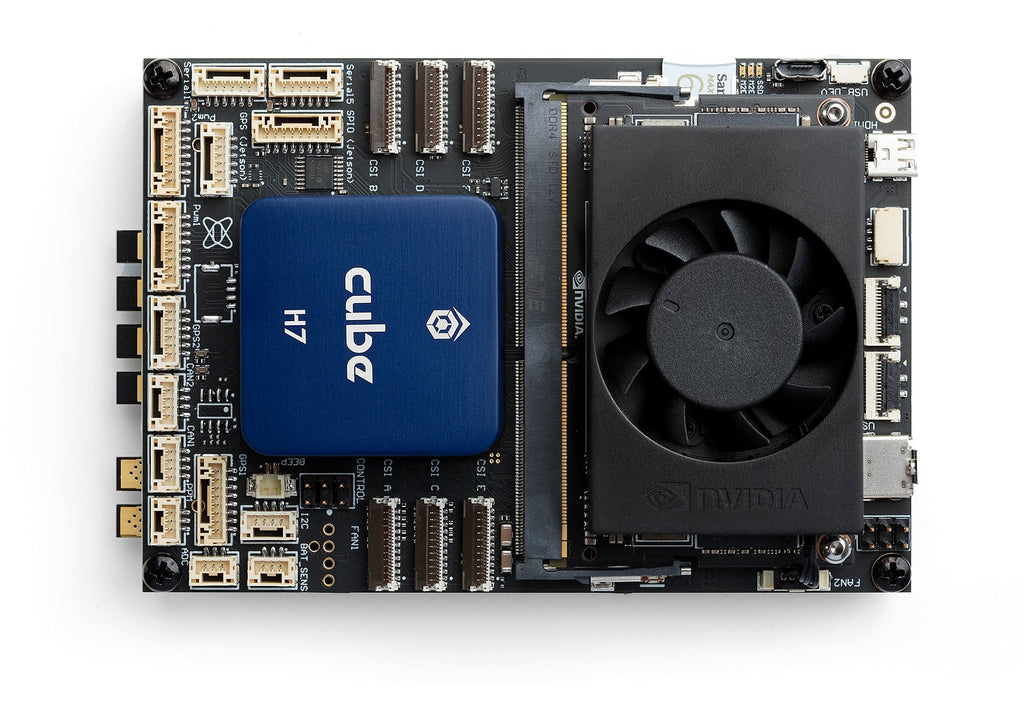
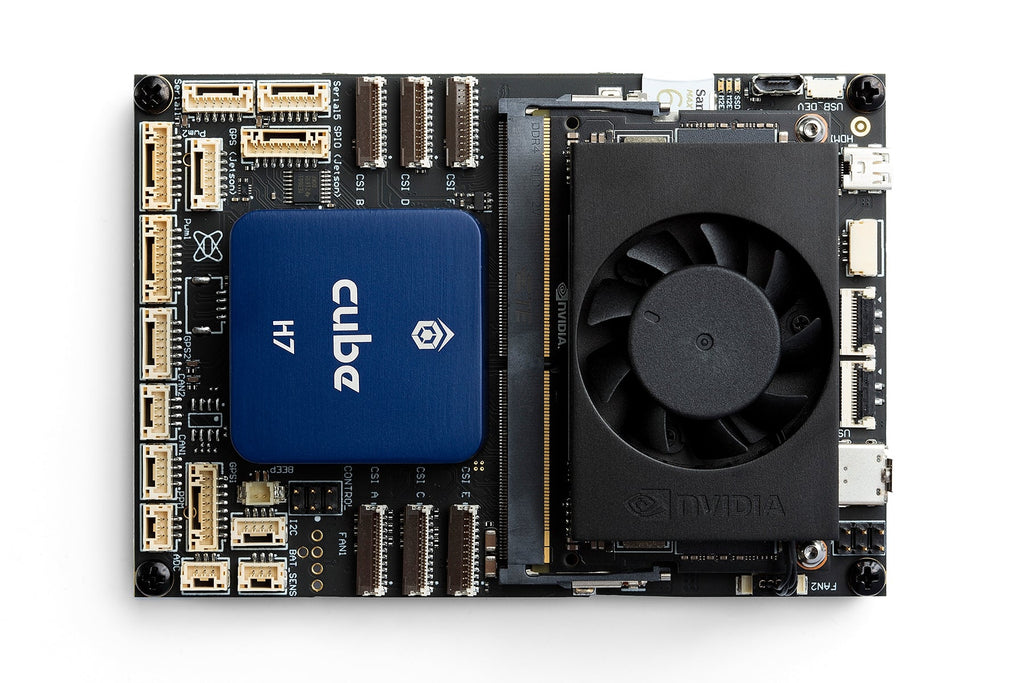
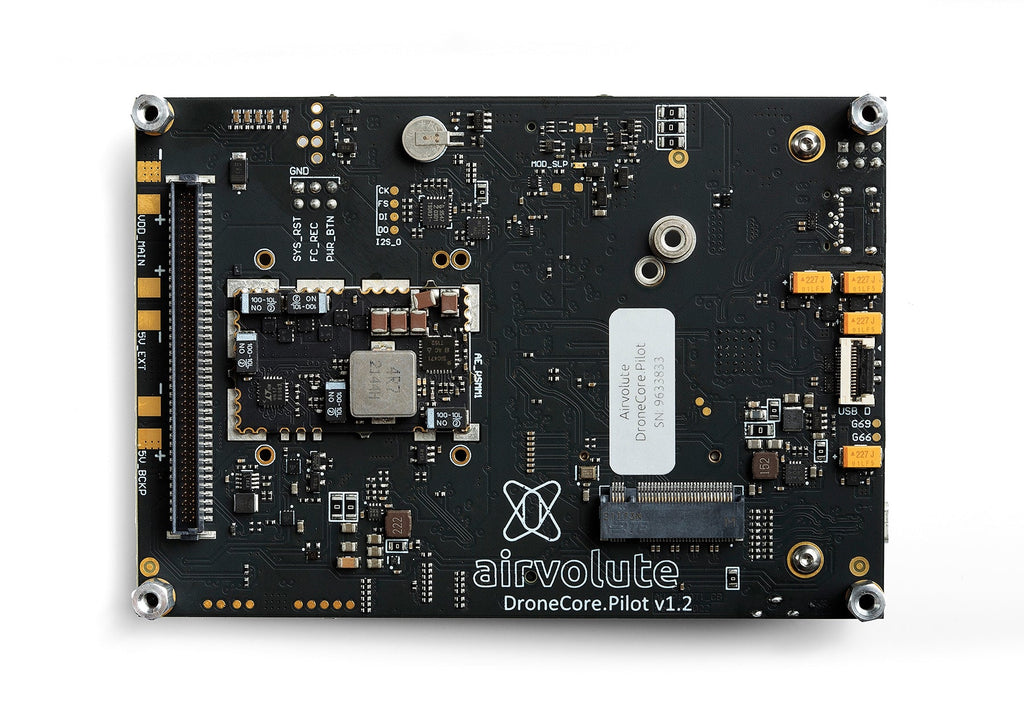
DroneCore.Pilot - top board for control of the aircraft containing
- Jetson Xavier NX
- Cube flight controller
- Internal 5V power supply
- Power selector
- Peripheral connectors
- USB hub
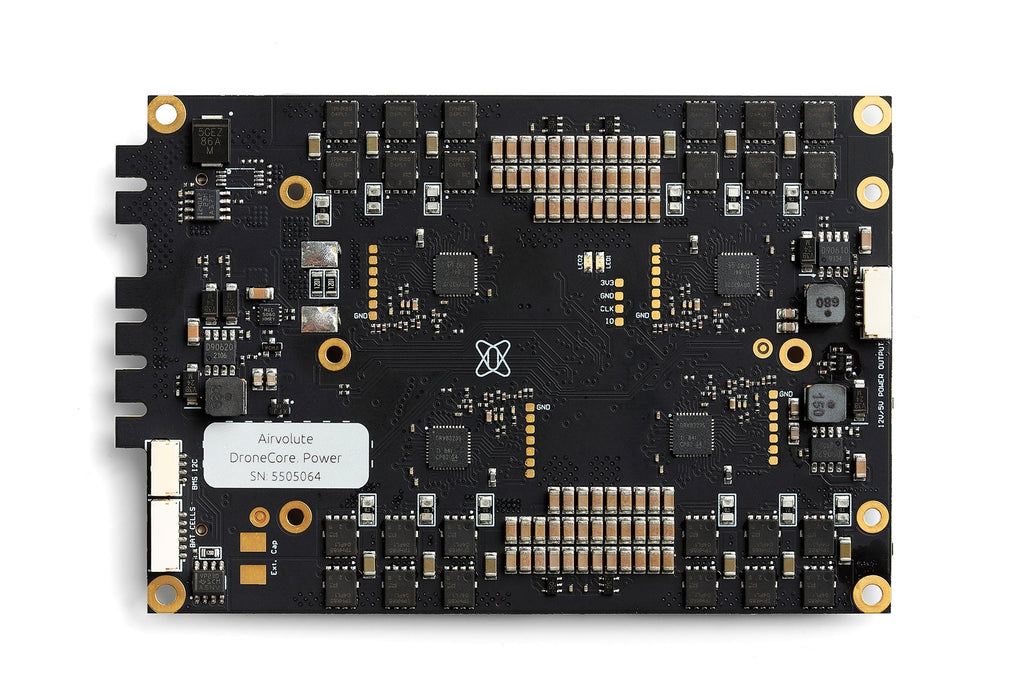
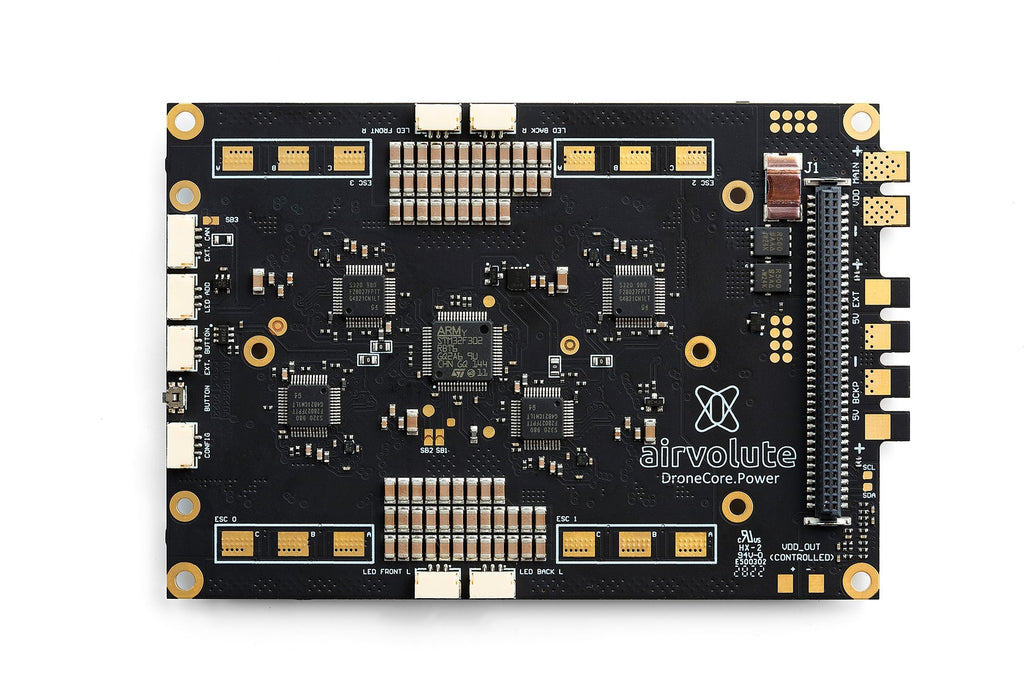
DroneCore.Power - bottom board with power electronic containing
- 4 FOC UAVCAN ESCs - 20A permanent / 40A peak current
- Power sensor (battery voltage and current measurement)
- Analog inputs for battery cell monitoring
- SMBUS
- LED Driver for 4 x WS2812B strips
DroneCore.Suite provides easy to use ROS based software stack supporting development of autonomous applications.
Out of the box device is configured to fly a quadcopter (though flight controller calibration is needed anyway).
Click here for documentation!