












Description
DroneCore 2
10 times faster time to market for UAS developers
DroneCore 2 is a modular AI-driven open architecture autopilot designed for complex use cases that combines high computational processing power, redundant connectivity, small size, and low weight.
AI-driven autopilot with NVIDIA Jetson, Cube, and ESCs

- NVIDIA Jetson: Xavier NX or Orin NX
- CubePilot: Cube Orange+, Blue or Red
- ESCs: 4x FOC-based speed controller
Features
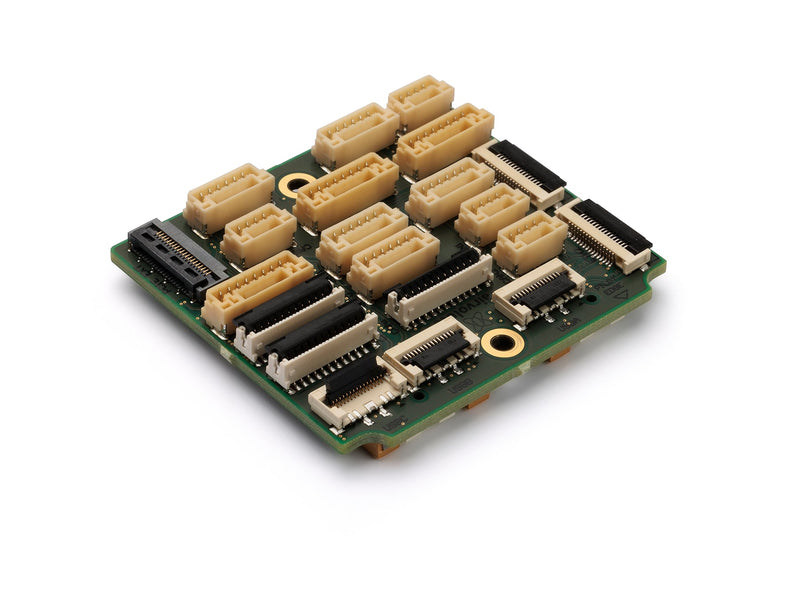
Modular design: single motherboard with various extension boards
Unique modular design allows manufacturers to combine a single motherboard with various extension boards with all required peripherals and connectors.
- The Cube Pilot (Orange+ or Blue) as primary autopilot
- STM32H7 onboard FMU as secondary autopilot
Powerful SDK and easy-to-use API interface
- ROS2-based SDK ready to use for autonomous flights
- Unified Python API for various software layers (hardware access, localization, navigation, AI, etc.)
- Open Source architecture
Various vehicles support
Support for different types of drones like VTOL, copters, planes, rovers, etc.
Specifications
Purpose
- The purpose of DroneCore 2.0 is to speed up UAS development with a cutting edge autopilot solution.
- With rich connectivity and modular architecture, version 2.0 is suitable for serial production of custom UASs.
Mechanical parameters
- Weight 206g - including Cube orange, Xavier NX, Xavier heatsink with fan
- Dimensions 119.5 x 51 x 41mm
Primary FMU Connections (CUBE Pilot)
- Direct PWM output (6 + 8 lines)
- PPM input
- 2x CAN, 4x UART, 2x I2C, analog
- Power sensor input, buzzer
Electrical parameters
- Power supply range: 12V – 35V (6S LiHV)
- Integrated DC/DC converter for control circuits
- Redundant power supply with power good monitoring for control unit
- Current protected peripheral connectors
- 4 x FOC UAVCAN ESC 40A, featuring motor identification and motor diagnostics
- Power sensor, SMBUS
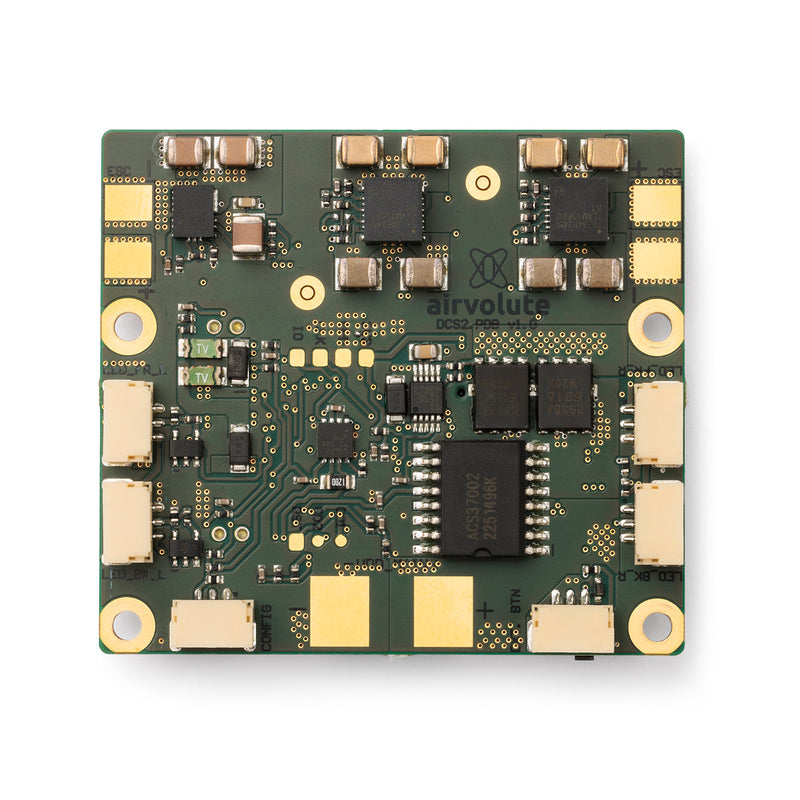
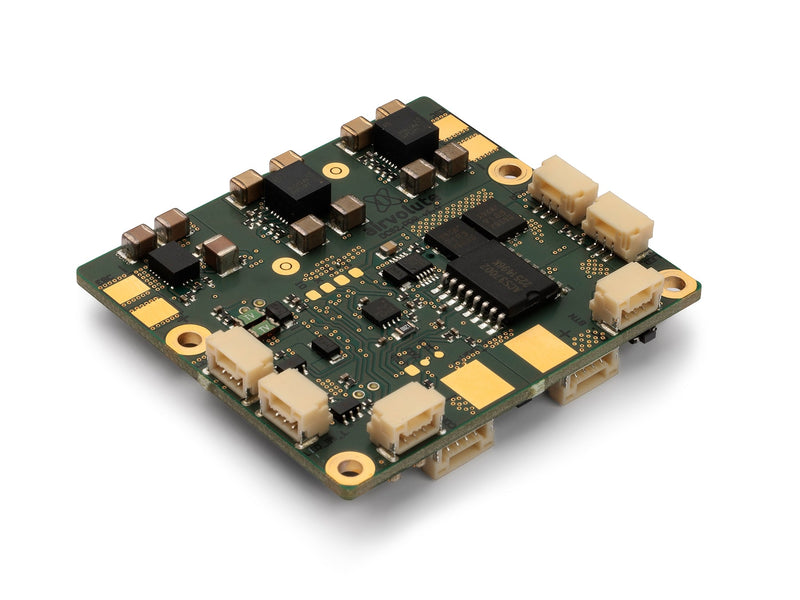
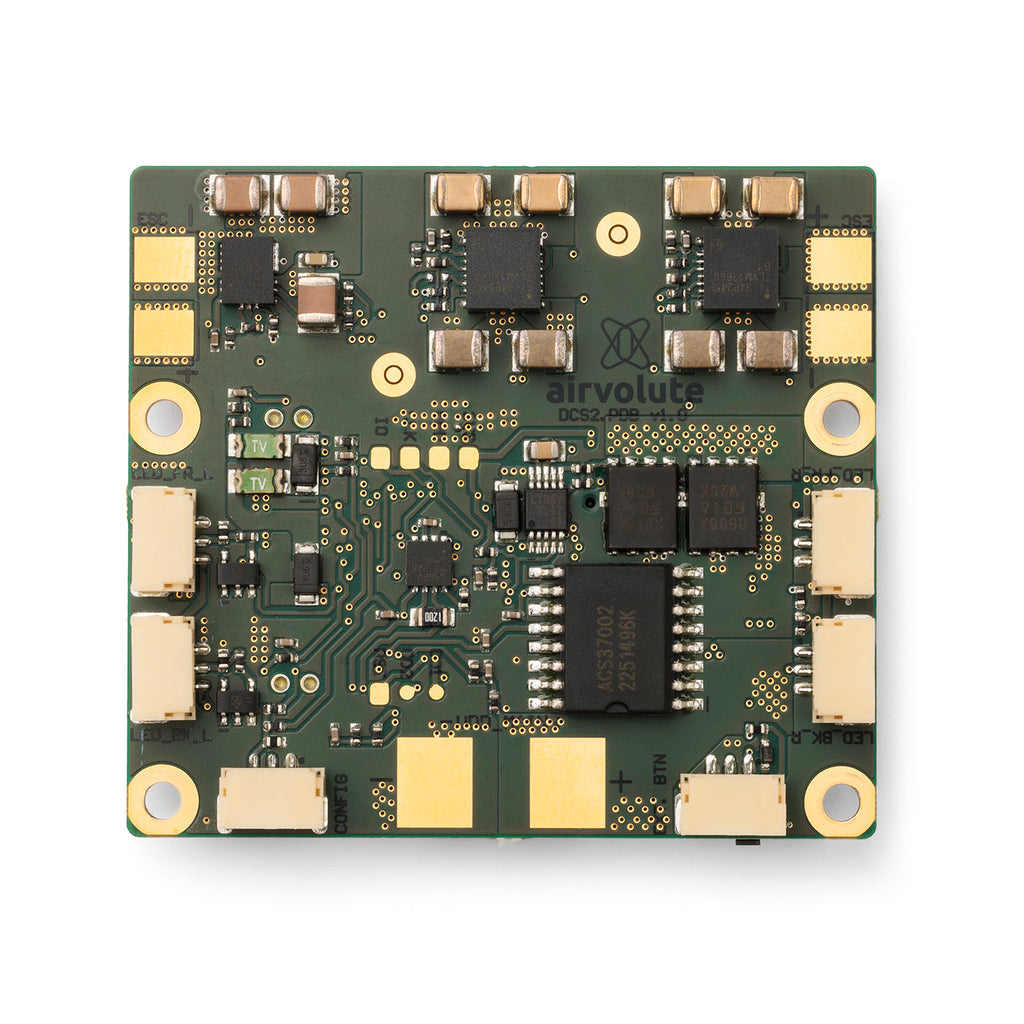
DroneCore.Power (bottom power board)
- 4 x FOC UAVCAN ESCs – 40A peak / 20A permanent
- power sensor, SMBUS,
- LED Driver for 4x WS2812B strips
Ardupilot (Cube) Connections
- PPM input
- PWM output (7 + 7 lines)
- 2x CAN
- 4x UART
- 2x I2C
- Buzzer
- Power sensor input
- ADC input
- Buzzer
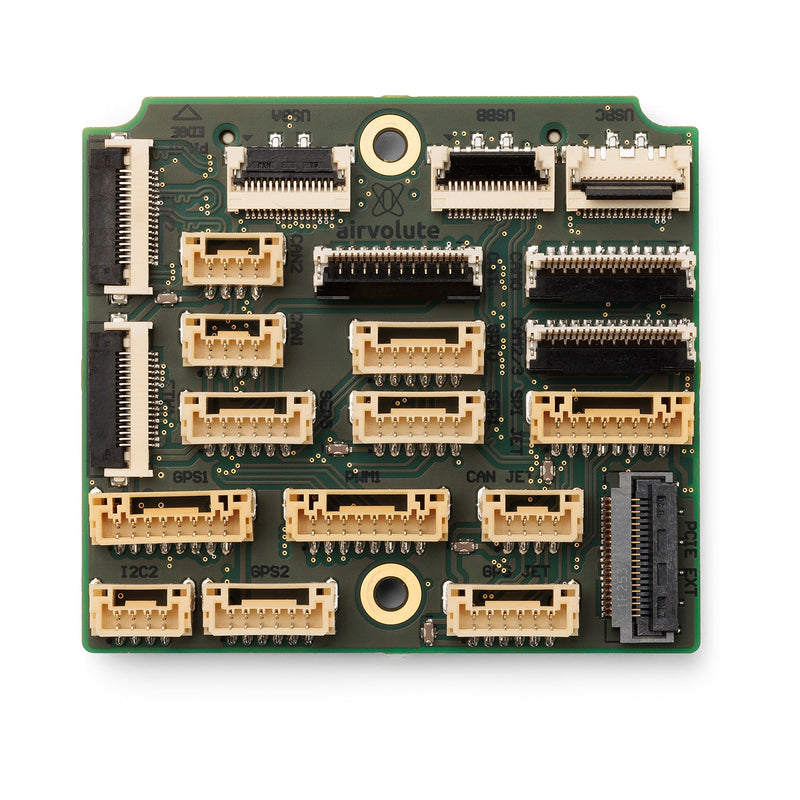
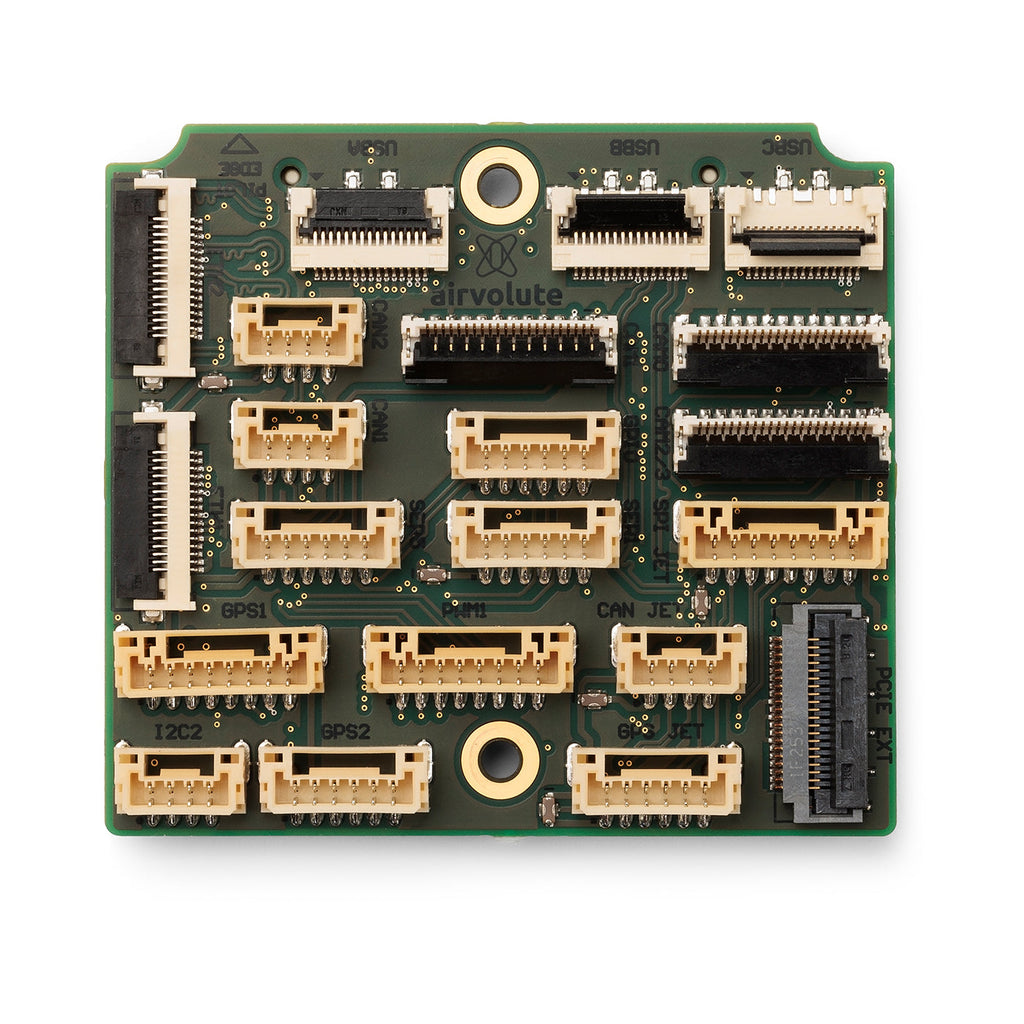
Jetson connections:
- PCI Express (M2, Key E connector)
- 4x USB 3.0 (ZIF connectors, reductions available)
- Gigabit Ethernet (ZIF connector, reductions available)
- 6 CSI (22 pin)
- 4 GPIO
- UAV CAN, UART, I2C, SPI
- IMU BMI088 and barometer BMP388 on board
- USB 2.0 for debugging
- Micro SD card
- Video output connector (micro HDMI)
- Fan
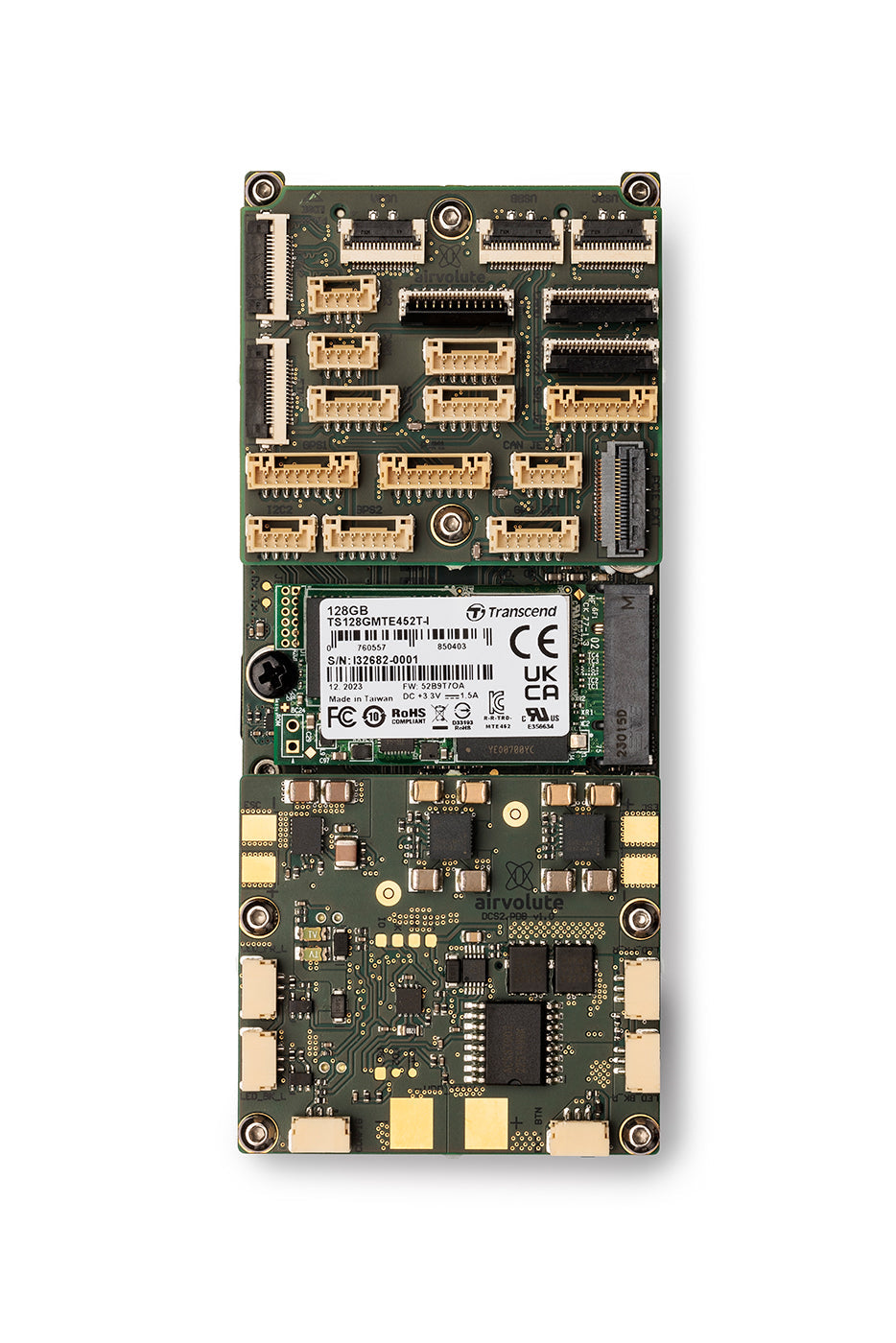
Details:
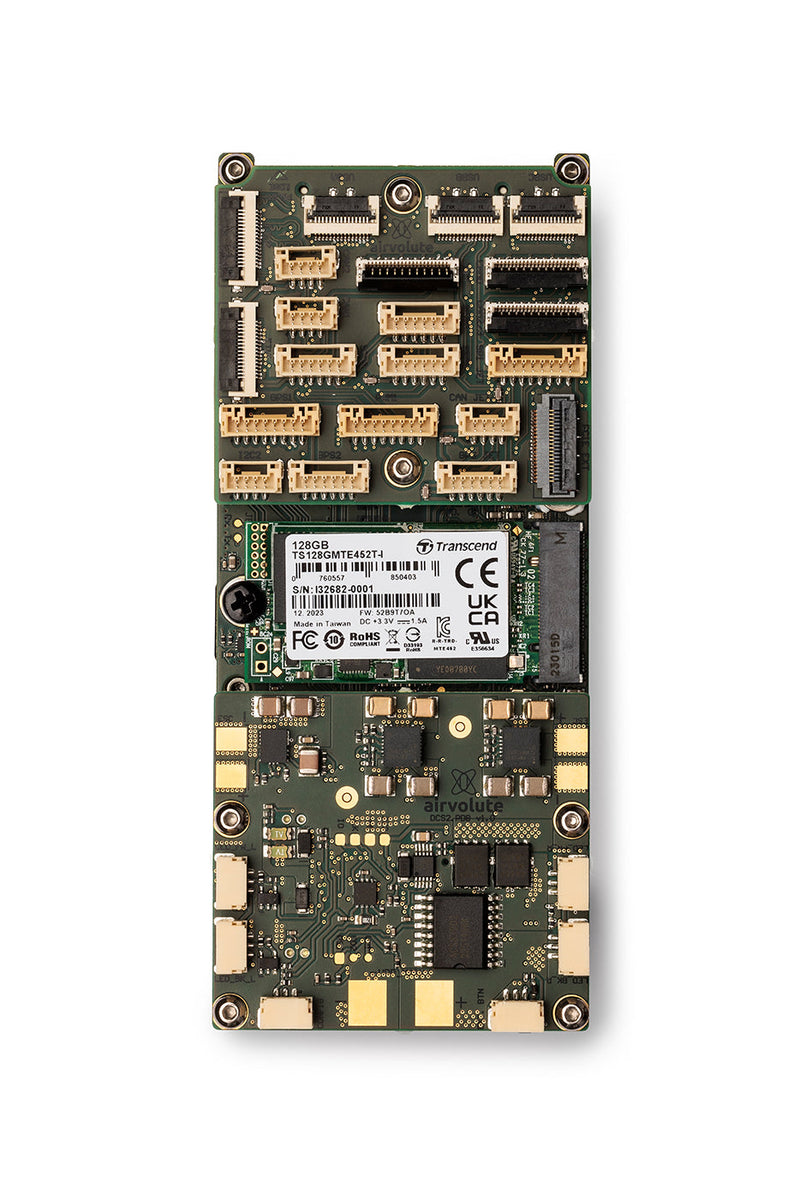
DroneCore.Suite consists of these main blocks
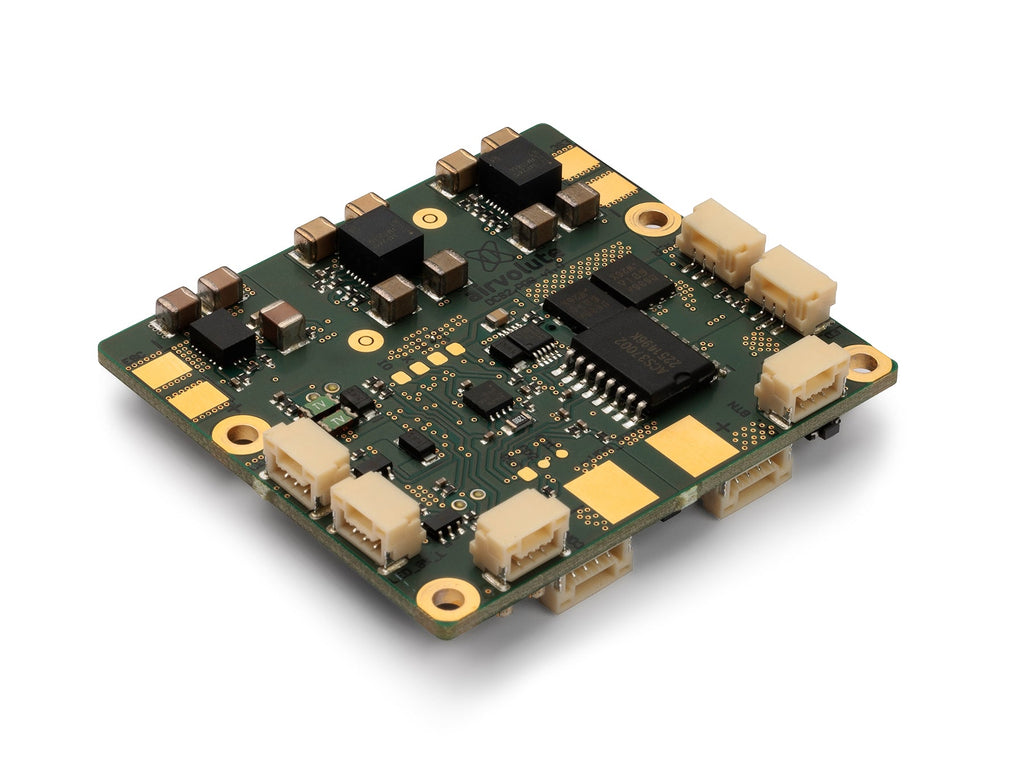
DroneCore.Pilot - top board for control of the aircraft containing
- Jetson Xavier NX
- Cube flight controller
- Internal 5V power supply
- Power selector
- Peripheral connectors
- USB hub
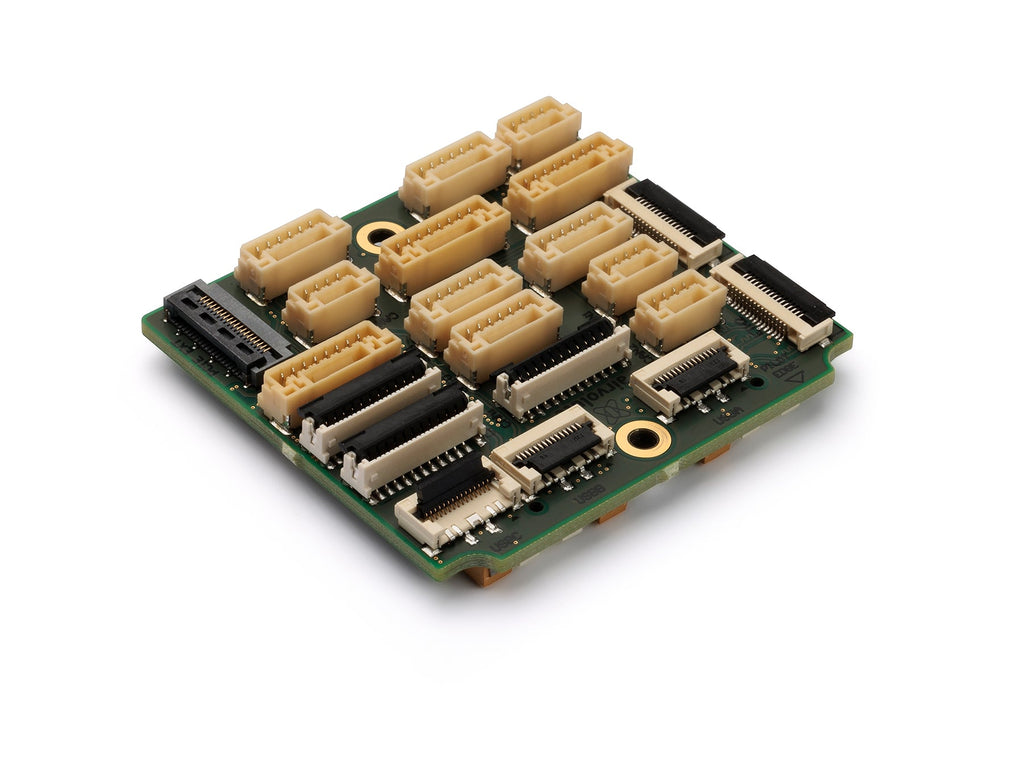
DroneCore.Power - bottom board with power electronic containing
- 4 FOC UAVCAN ESCs - 20A permanent / 40A peak current
- Power sensor (battery voltage and current measurement)
- Analog inputs for battery cell monitoring
- SMBUS
- LED Driver for 4 x WS2812B strips
DroneCore.Suite provides easy to use ROS based software stack supporting development of autonomous applications.
Out of the box device is configured to fly a quadcopter (though flight controller calibration is needed anyway).
Click here for documentation!